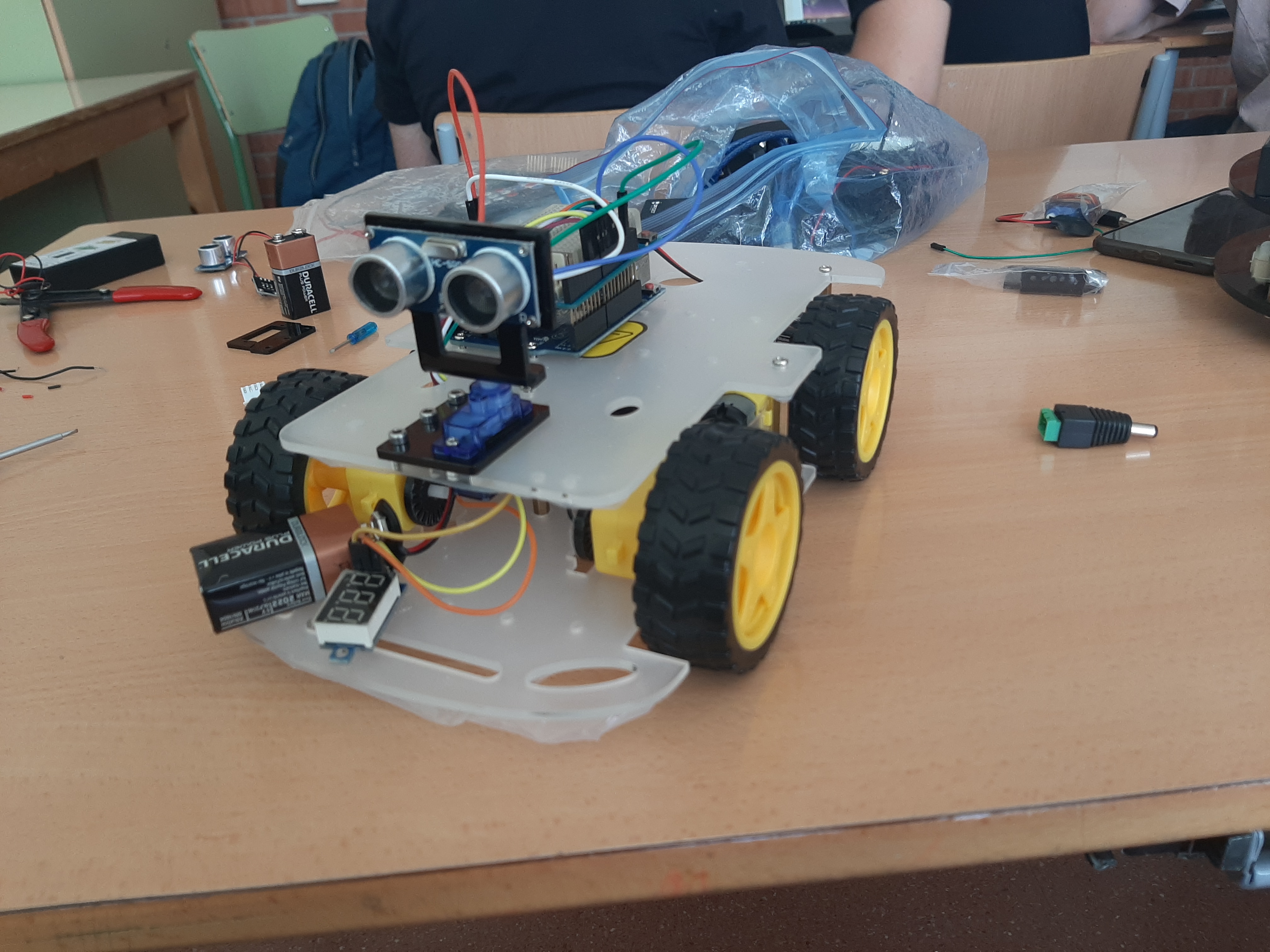
The main idea was to create a robot that could go by it self from one place to another with a build-in gps and also an ultrasound emitter and receiver an ultrasound emitter and receiver so that it would not be crashed if there was any obstacle in front of it. In addition, all the information that we need to introduce to the robot to go to a place to another would do it by an app created in the appinventor, connected to the robot with a module of Bluetooth.
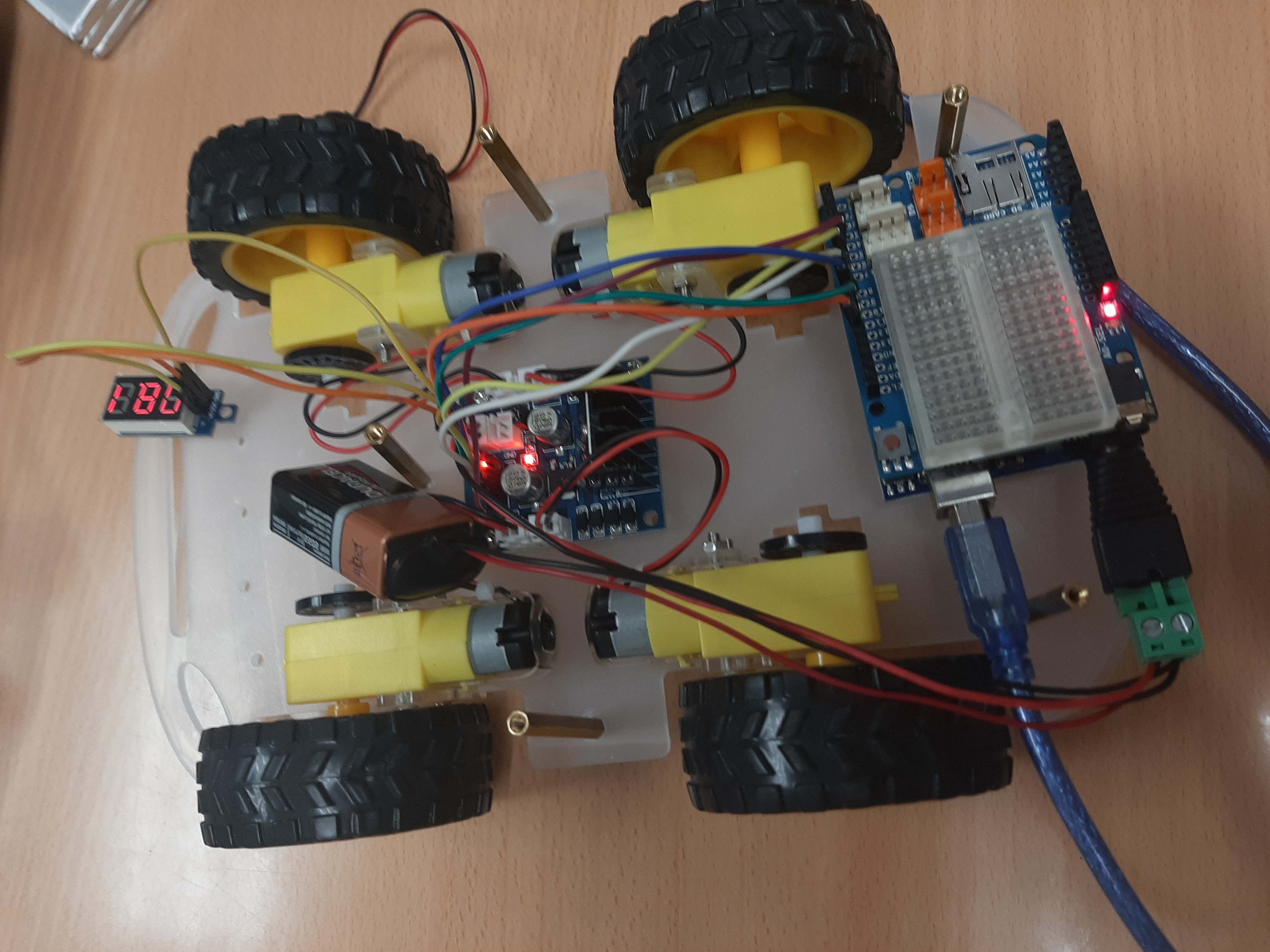
To start, the first day we need to search to found the bases of the robot: the motors, the arduino, the h-bridge , and others. Then we start building the robot and uploading the code to the arduino giving basics instructions to the robot. When we have all the parts reunited we united them in a standard board of the robot, putting theirs cables in the corresponding in put and out put of the arduino and all the compounds. The, we screwed the main pieces and we put in order all the cables. Finally, we put the other standard board of the robot in the top and we pass all the cables into the holes and for the last, screw the arduino and the pices that goes in the superior board. After having some problems with the bateries, that they had no voltage, we were able to make it go forwards, backwards and sideways.
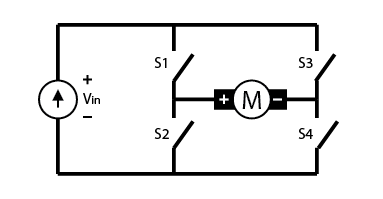
The H-bridge is a controller board that his main funcion is control the flow of current through four switches and conected to the arduino, with a code adding their pins corresponding, could control the 4 wheels and force him to do the instructions that are written in the code.
The rest of the days, we added to the robot the ultrasounds and putting into operation and connecting each input with the output of the arduino. Also, we screwed the parts of the ultrasonud correctly and making it rotatable. In addition, we integrated the module of Bluetooth to used to make and app in AppInventor to had a controller to go to any direction in real time. After creating the app and putting the module of Bluetooth the robot could go to the direction you want.